Phase 2: Prototype with Swerve, Arm, Vision
To build our knowledge and experience, we are planning to create a robot prototype with Swerve modules from WCP, with reference design of Arm from Team 6995 , and Photonvision with OrangePi
Building Swerve Base
-
![]()
Frame Assembly
-
![]()
Assembling WCP Swerve Module
-
![]()
Assembling WCP Swerve Module
-
![]()
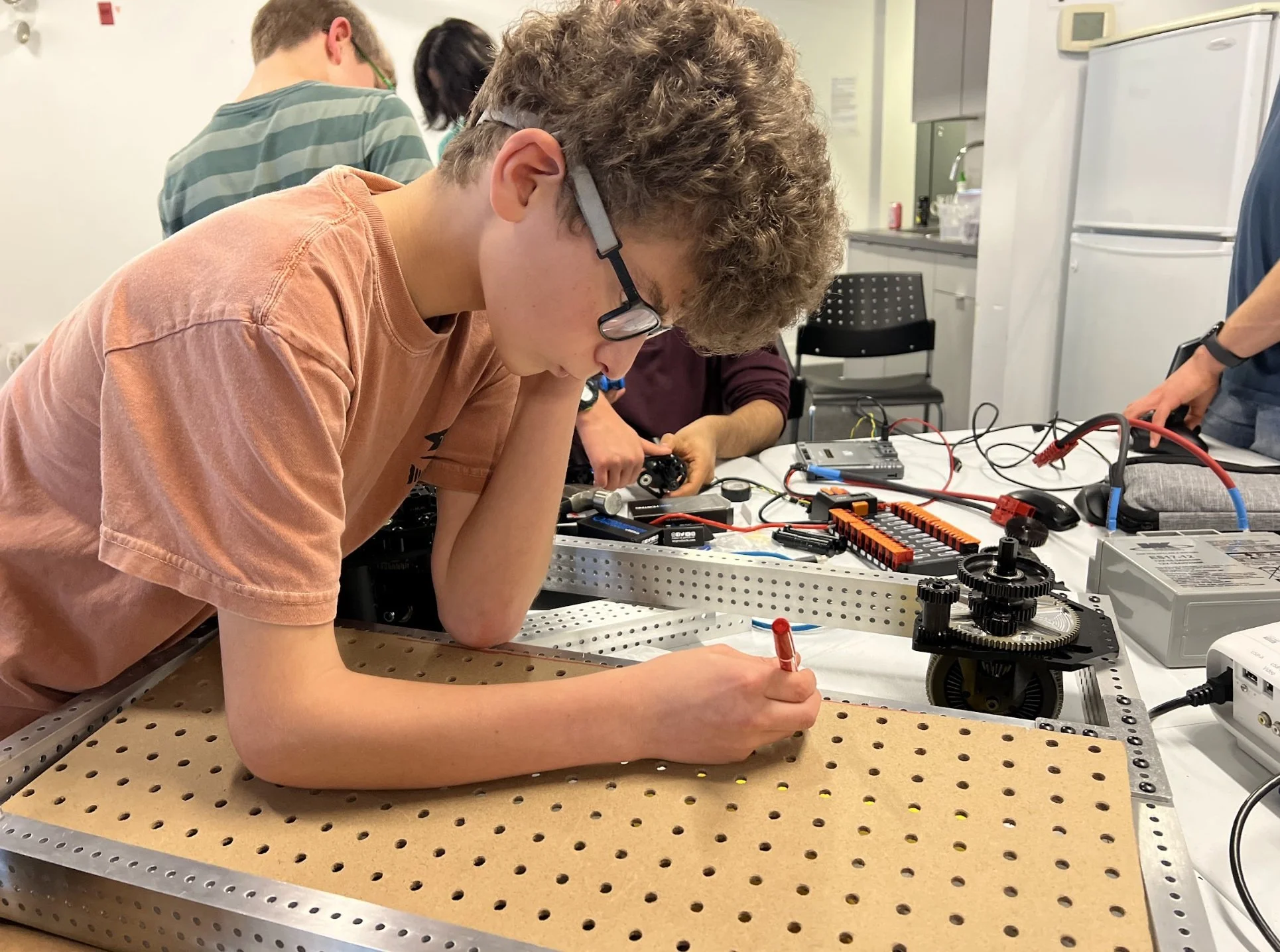
Prototyping Baseboard
-
![]()
Testing Kraken Motors
-
![]()
Integrating into base frame
-
![]()
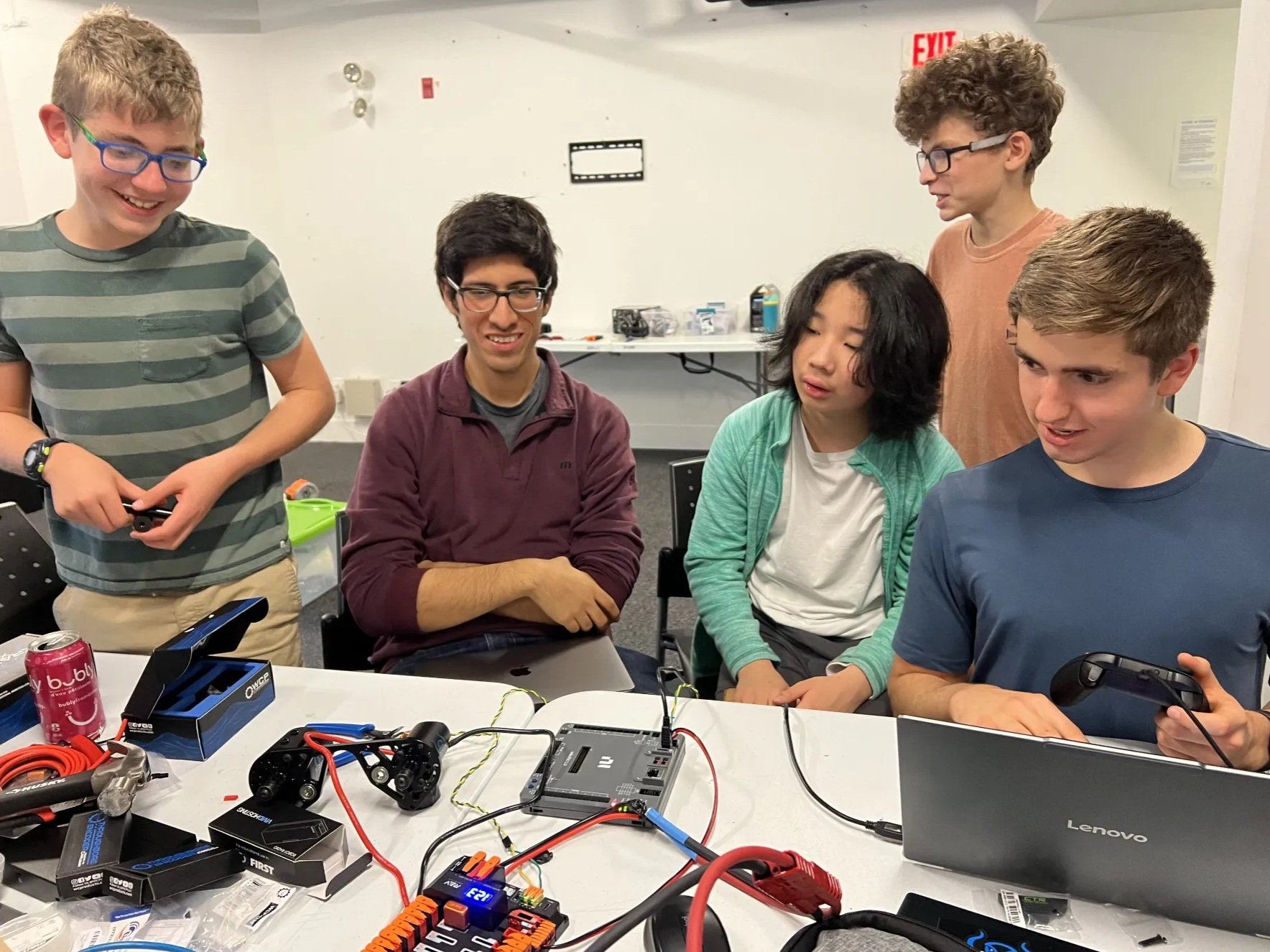
Software Testing